
Boyuna Emniyetli Yanaşma Hızı :
Bir geminin emniyetli yanaşma hızı dediğimizde klasik anlamda geminin bir liman tesisine yaklaşırken olan doğrusal hızını emniyetli bir şekilde planlı olarak kademe kademe azaltmasını ve rıhtıma aborda olurken de geminin deplasmanına ,kütlesine bağlı olarak yatay yanaşma hızının yönetilmesini anlıyoruz.
Denizcilik tarihine geçmiş en büyük deniz kazaları genelde bu yaklaşma hızının iyi yönetilmemesi neticesi meydana gelmiştir.
Her ne kadar gemilerin kütleleri ,makine özellikleri ,kullandıkları römorkörlerin gücü ve bağlama açısı ,doğal koşullar gibi değişkenlerin formüle girilmesiyle elde edilen hesaplamalar olsa da gemi kullanıcının bakış açısından pratik kullanıma yönelik olarak konuyu daha çok deneyimlerin ışığında ele alacağız.
Ancak asıl konuyu pratik yönü ile ilgili olarak ele almadan önce yaklaşım hızını ve kat edilen mesafeyi hesaplayan formülü aşağıda gösterecek olursak :

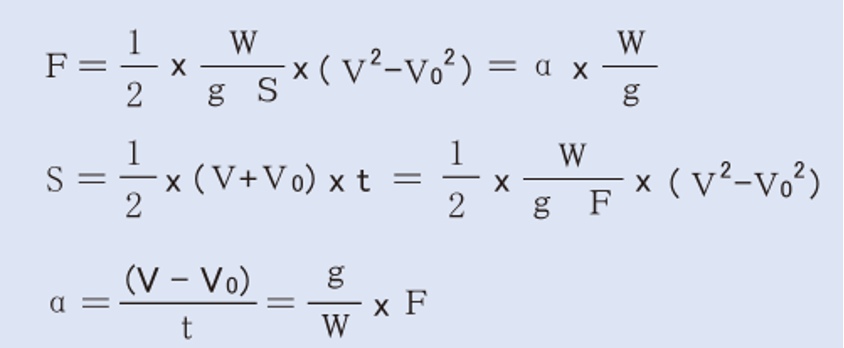
W = Geminin deplasmanı + İlave kütle ( Added mass ) ( ton )
Vo = Başlangıçtaki hız
V = Sonraki hız
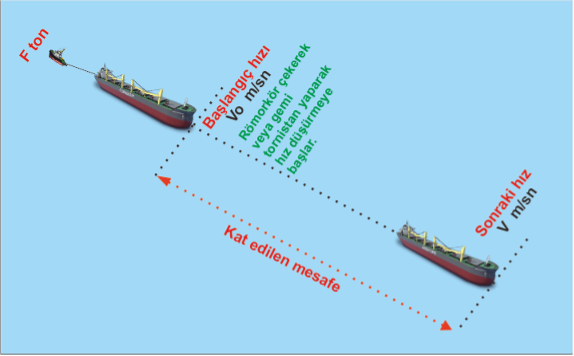
F = Römorkör veya gemi makinesi tornistan yapılarak
uygulanan yavaşlatıcı kuvvet ( ton )
t = Geçen süre ( sn )
S = İlerleme ( mt )
a = gemi hızının ivmesi
 Aşağıdaki şekille gösterildiği gibi bu formülle geminin bir noktadan belli bir noktaya giderken ikinci noktada istenen hıza göre gemiye uygulanması gereken yavaşlatıcı kuvveti ve bu esnada kat edilecek mesafeyi bulabiliriz.
Aşağıdaki şekille gösterildiği gibi bu formülle geminin bir noktadan belli bir noktaya giderken ikinci noktada istenen hıza göre gemiye uygulanması gereken yavaşlatıcı kuvveti ve bu esnada kat edilecek mesafeyi bulabiliriz.
Her ne kadar konunun anlaşılması için çok faydalı olsa da pratik açıdan gemi kullanıcıların manevra öncesi bu tarz bir hesap yapacaklarını beklemek pek gerçekçi olmaz.
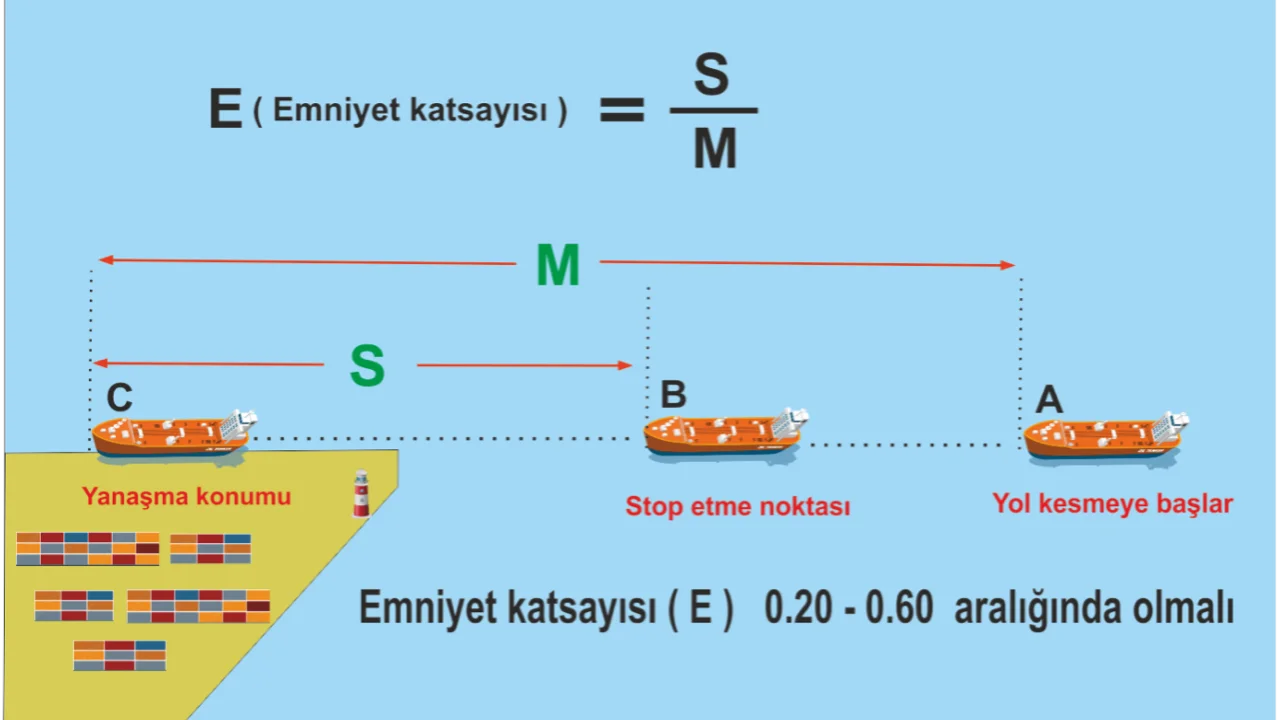
 Bu konuda emniyet kriterleri gemi tiplerine , ne kadar yüklü olduklarına ve mevcut doğal şartlara göre deneyimlerle büyük ölçüde belirlenmiştir. Bu konuda akılda kolayca kalacak bir emniyet kriterini aşağıdaki şekil üzerinden açıklayabiliriz :
Bu konuda emniyet kriterleri gemi tiplerine , ne kadar yüklü olduklarına ve mevcut doğal şartlara göre deneyimlerle büyük ölçüde belirlenmiştir. Bu konuda akılda kolayca kalacak bir emniyet kriterini aşağıdaki şekil üzerinden açıklayabiliriz :
Yukarıdaki şekildeki gemi A noktasına geldiğinde yol kesmeye başlamıştır. B noktası ise makinelerini stop ettiği konumdur. Bu konumdan geminin yanaşacağı noktaya olan mesafe ( S ) , İlk yol kesmeye başladığı konumdan finalde yanaşacağı noktaya olan mesafeye ( M ) bölünerek (E) ile ifade edilen bir emniyet katsayısı elde edilir.
Geminin deplasmanı ve ilave ağırlık etkisi toplamına bağlı olarak emniyet katsayısının 0.20 ile 0.60 değerleri arasında olması beklenir. Burada her ne kadar emniyet katsayısı’nın belirtilen değerler arasında olması gerektiği belirtiliyorsa da bu hususta gemilerin deplasmanlarını dikkate alıp söz konusu katsayı değerini biraz daha detaylandırmakta fayda vardır.
Büyük deplasmana sahip gemilerin emniyet katsayısı hesabında 0.20 değerine daha yakın bir oran idealdir. Deplasman küçüldükçe 0.60’a doğru daha büyük oranda gerçekleşen bir emniyet katsayısı söz konusu olur.
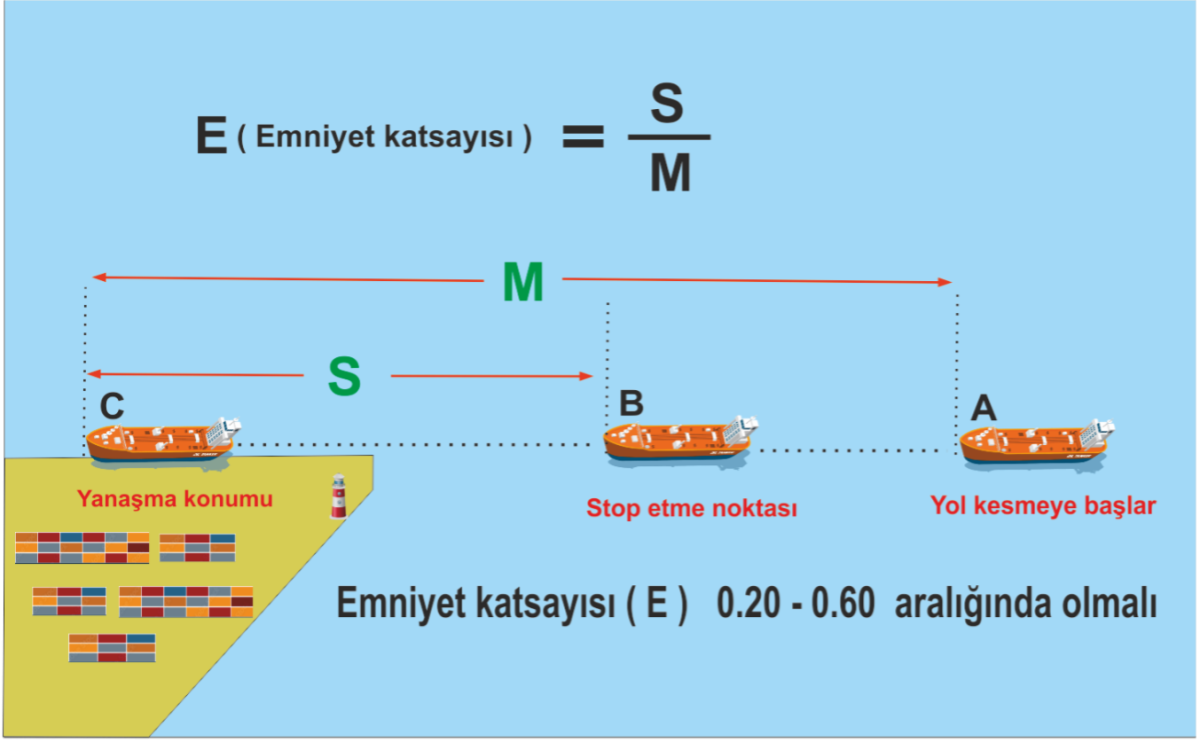
Bu anlattığımızı aşağıda yer alan şekil üzerinden anlatacak olursak :
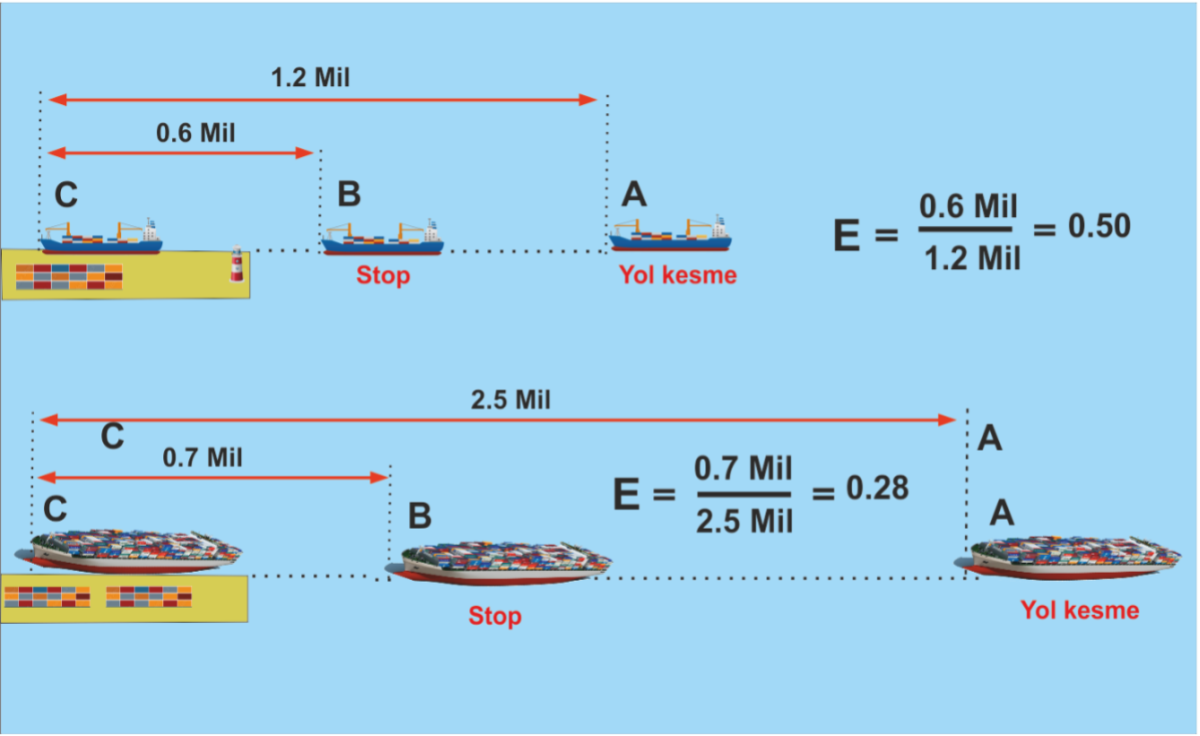
Yukarıdaki şekilde gösterilen boyu 300 metreye yakın olan konteyner gemisi yanaşacağı konuma 2.5 mil kala yol kesmeye başlamış ve aynı noktaya 0.7 mil kala makinelerini stop etmiştir. Bu değerlerle emniyet katsayısı 0,28 olarak hesaplanır.
Aynı terminalde diğer bir rıhtıma yanaşmak üzere ilerleyen 125 metre boya sahip konteyner gemisi ise yanaşacağı rıhtıma 1.2 mil kala yol kesmeye başlamış ve aynı konuma 0.6 mil kala makinelerini stop etmiştir. Bu değerlerle emniyet katsayısı 0,50 olarak hesap edilir.
Görüleceği üzere diğer büyük gemi 0.50 emniyet katsayısına denk gelen bir mesafede yol kesmeye kalkarsa muhtemelen rıhtım yaklaşımında emniyet kriterlerinin dışında nispeten yüksek bir hıza sahip olacaktır.
Sonuç olarak küçük deplasmanlı gemilerin bu emniyet katsayısı aralığının daha üst değerlerine yakın olması beklenebilir. Ancak büyük deplasmanlı gemilerin emniyet katsayısının daha alt değerlerde olması gerekir.
Ancak en başında belirttiğimiz gibi yazımızda teorik hesaplamalardan çok deneyimlere ve defalarca denenmiş kriterlere vurgu yapacağız. Özellikle gemi kaptanları ve kılavuz kaptanların yıllar içinde yaşadıkları deneyimler ve bu deneyimleri yazıya aktaranların sayesinde elimizde oldukça geniş bir bilgi havuzu mevcuttur. Kendi deneyimlerimizin de içinde olduğu bu bilgi havuzunu oluştururken pratik kullanım için belli başlı gemi tipleri ve tonajlarına göre sınıflama yapılmıştır. Örnek gemilere denk gelen yaz deadweight tonları, gemi boyları halen hizmette olan belli gemilere aittir ancak isimleri verilmeden tabloda yer verilmiştir.
Aşağıdaki tablo oluşturulurken gemilerin tam yüklü oldukları var sayılarak hedefe kalan mesafeye göre olması gereken hızlar verilmiştir. Ancak unutulmamalıdır ki tonajları, boyları birbirine çok yakın olan gemilerin su altı şekilleri, makine güçleri, kapasiteleri birbirinden çok farklı olabilir . Bu nedenle tabloda verilen değerlere kabaca fikir verecek bir referans olarak bakmak ve değerlendirmek daha doğru olur. Bu farklı özelliklere göre bu değerler az ya da çok farklı olabilir ve en doğru değerlendirmeyi yapacak olanlar gemisini herkesten iyi tanıyan ve bölgede görev yapan kılavuz kaptanın danışmanlığından yararlanmasını bilen gemi kaptanları olacaktır. Hatırlatmamız gereken diğer bir husus da akıntı ve rüzgâr etkisi başta olmak üzere bu tabloyu hazırlarken normal ölçüler içindeki doğal şartların dikkate alınmış olduğudur.
Hatırı sayılır bir akıntı ve rüzgar etkisi altında bu değerleri gereken şekilde revize ederek kullanmak doğru olacaktır.
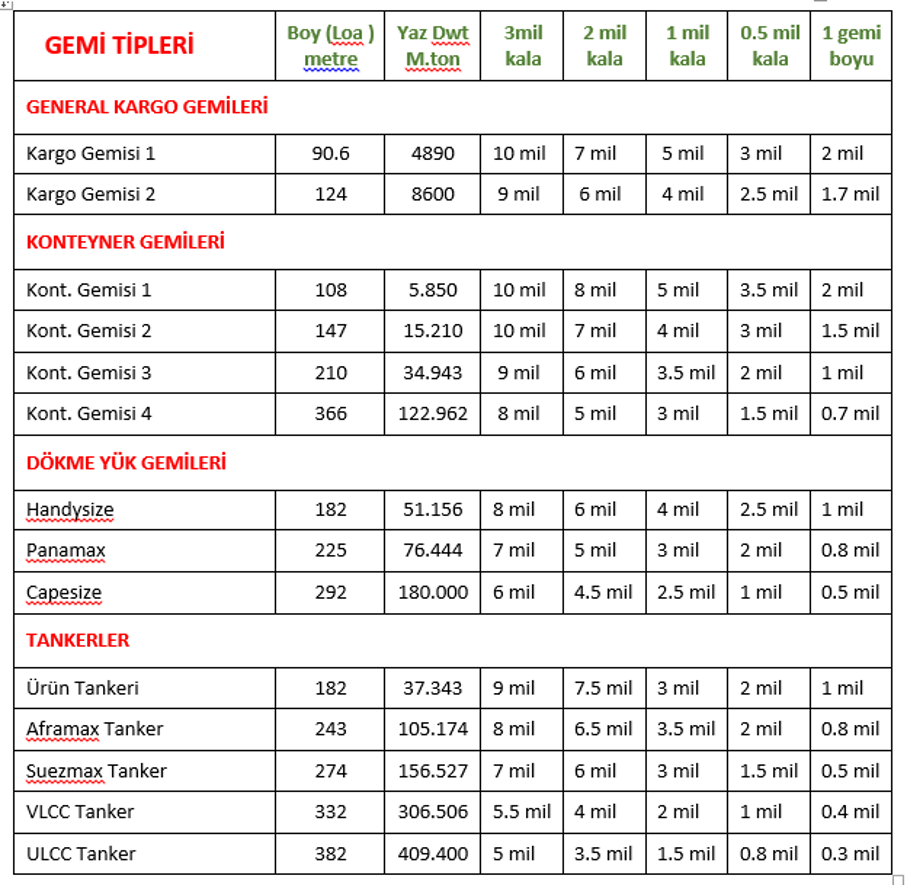
Tablo incelendiğinde özellikle kargo gemilerinin benzeri tonaj ve boydaki konteyner gemilerine kıyasla daha düşük bir süratle yanaşma manevrasına girmelerinin tavsiye edildiği görülecektir.
Zira benzer tonajdaki konteyner gemileri genelde baş-iter veya kıç-iterlerle donatılmış oldukları için dümen dinlememe durumunda tekrar yol vermek yerine baş veya kıç iterleriyle bu durumu telafi edebilirler. Oysa birçok kargo gemisinde bu imkan olmadığı için nispeten daha düşük bir yaklaşma hızı tavsiye edilir ki gerektiğinde kısa süreli ileri yol vererek gemi dümen dinletilerek kontrol altına alınabilsin. Aynı durumu benzer ebattaki dökme yük gemileri, tankerler ve konteyner gemileri arasında kıyas yaptığımızda da görürüz. Benzer ebattaki dökme yük gemileri ve tankerler , muadilleri konteyner gemilerine göre daha düşük ve kontrollü bir süratle yaklaşım yaparlar.
Her geminin deplasmanı, su altı yapısı ,rüzgar alanı ,tekne narinlik katsayısı ,makine gücü ve özellikleri, dümen sistemi, baş-iter veya kıç-iter ‘e sahip olup olmadığı, trim durumu gibi birçok etken normal şartlar altında terminal yaklaşımlarındaki hız kontrolü yöntemini doğrudan etkiler. Esasen bu gibi özellikler aynı tonaj aralığındaki her gemiler için bile karşımıza farklı senaryolar çıkartır.Esasen bu özellikleri en iyi bilen kişi gemi kaptanının kendisinden başkası değildir. Kılavuz kaptanlar her ne kadar bu konularda oldukça deneyimli olsalar da söz konusu karakteristiklerin gemi kaptanı tarafından kılavuz kaptana izah edilmesi liman manevralarının emniyeti bakımında son derece önemlidir.
Yukarıda verilen tablo pratik kullanım için aşağıda yer alan çoklu eğri grafiği ile de düzenlenmiştir.
Yaklaşma yöntemi ne kadar emniyetli olursa olsun makine ,dümen sistemleri ve var ise ,baş ve kıç iterlerin her zaman arıza yapabileceği hususu akıldan çıkartılmamalı , ideal olarak römorkörler geminin yanaşacağı rıhtıma minimum 0.5 mil kala emniyetle bağlanmış olmalıdır. Römorkörün gemi ile olan hidrodinamik etkileşimleri zaman zaman geminin baş ve kıç tarafına yakın alanlarda alçak ve yüksek basınç alanları oluşturur ve yüksek hızlarda bu durum römorkörün kontrolünü kaybedip gemiye çarpması vs.gibi tehlikeli durumlara yol açabilir.Bu nedenle römorkörler ideal olarak gemi hızı 3 – 3.5 knot arasında iken halat alma ,verme operasyonunu gerçekleştirmek emniyetli kabul edilir.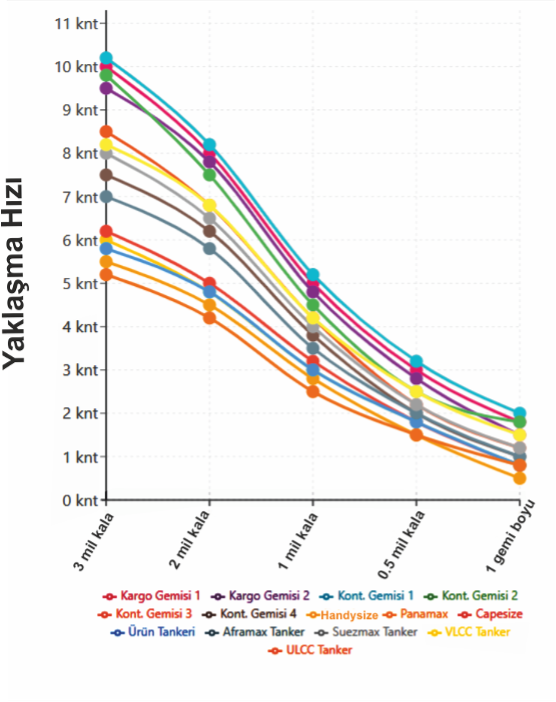
Çok acil bir durum söz konusu olmadıkça römorkörler, gemi hızı 4 knot ve üstünde iken bağlama pozisyonuna girmemelidirler. Yukarıda da ifade edildiği gibi, tablo ve grafikte tavsiye edilen yaklaşma süratleri, normal doğal koşullarında yüklü gemi şartlarını temel almıştır. Ancak bazı rıhtımlar hava durumuna, çevredeki doğal ve meteorolojik şartlar sonucu çok kuvvetli akıntı ve rüzgâra tabi olabilirler. Böyle durumlarda gemi kullanıcı, tavsiye edilenin üstünde bir hızla yanaşacağı rıhtıma yaklaşmayı tercih edebilir. Geminin manevrada kullanmakta olduğu römorkörler, kimi ekstrem akıntı ve rüzgâr şartlarında tam olarak yeterli olmayabilir.
Bir geminin akıntı ve rüzgârdan etkilenmesi, kendi hızındaki değişim ile ters orantılıdır.
Bir örnek verecek olursak; sert bir akıntıda, yanaşacağı rıhtıma beş (5) gemi boyu kala 1,5 knot olan yaklaşma hızı ile ilerleyen bir gemi, hızını 3 knot’a çıkardığında rüzgârın gemi üzerindeki etkisi yarı yarıya düşer. Aynı durum akıntı için de geçerlidir.
Bu tarz bir durumda gemi kullanıcı, römorkörlerin yardımına ilaveten, gemi hızını gerektiği gibi ayarlamak ve önlemini de baştan almak kaydıyla daha farklı bir yönteme başvurabilir.
Aşağıda verilen şekil üzerinden açıklayacak olursak:
Şekildeki, boyu 200 metre üzerindeki konteyner gemisi, 2-3 knot civarı sıkıcı bir akıntıda yanaşma manevrasına girmektedir.
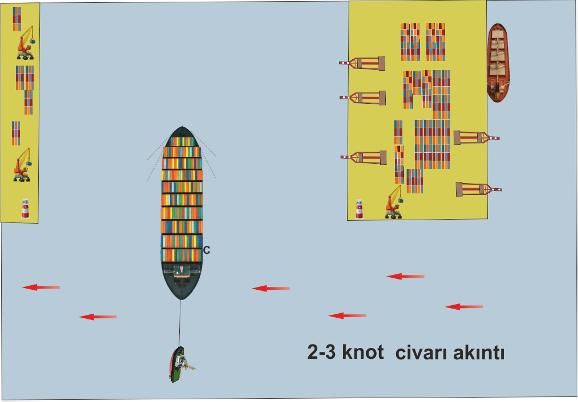
Draftı 10 metrenin üzerinde olduğu için karina altındaki su derinliği azaldıkça üzerindeki akıntı etkisi geometrik olarak artacaktır. Bu noktada römorkör kıç tarafı kontrol edebilse bile geminin baş itici muhtemelen yeterli olamayacak, kıç taraf akıntıya karşı kontrol altına alınmaya çalışılırken gemi ister istemez iskeleye doğru orantısız bir şekilde dönme eğiliminde olacaktır.
Ancak gemi kullanıcısı burada farklı bir yöntem kullanır. Akıntıdan daha az etkilenmek için geminin süratini artırır ve bu durumu kontrol altına alabilmek için de kıç tarafta bağladığı ASD römorkörü kıç merkeze konumlandırır. Gemi sancak taraftaki tesisin hizasından içeri girdiğinde zaten akıntı etkisi minimuma inecektir. Bu nokta geçilir geçilmez normalden biraz yüksek olan yaklaşma hızını düşürmek için makineyi uygun biçimde tornistan çalıştırır. Ancak hızını duruma göre daha çabuk düşürmek istiyorsa kıç tarafta konumlanan römorkörü de kullanarak geminin hızını istediği şekilde gecikme olmaksızın düşürebilir.
Enine Emniyetli Yanaşma Hızı:
Gemilerin rıhtım ve terminallere yanaşırken enine yanaşma hızları da çok önemlidir. Gemilerin deplasmanları arttıkça bu daha da önemli hale gelir.
Tanker terminallerinde gemi kullanıcıya yardımcı olmak amacıyla uzaktan görülebilen, geminin enine yanaşma hızını baş ve kıç taraflar için ayrı ayrı gösteren elektronik hız göstergeleri vardır.
Özellikle nispeten büyük gemileri yanaşılacak rıhtıma yaklaştıkça paralele almak ve kontrollü bir hızla yanaştırmak sıklıkla uygulanan bir yöntemdir.
Büyük gemilerin rıhtımla temasını tek bir noktadan değil de mümkün olduğunca paralel bir yaklaşımla gemi boyunca homojen bir biçimde gerçekleştirmeye çalışmak çok daha emniyetli ve tavsiye edilen bir yöntemdir.
Yüksek bir enine yanaşma hızı usturmaça aksamlarında ilk başta fark edilen ya da gözle fark edilemeyen hasarlara yol açabildiği gibi rıhtımın üzerinde durduğu kazıkların yerinden oynamasına da neden olabilir.
Boyuna yanaşma hızındaki gibi benzer bir yöntemle hesaplanan enine yanaşma hızı için de bir emniyet katsayısı vardır.
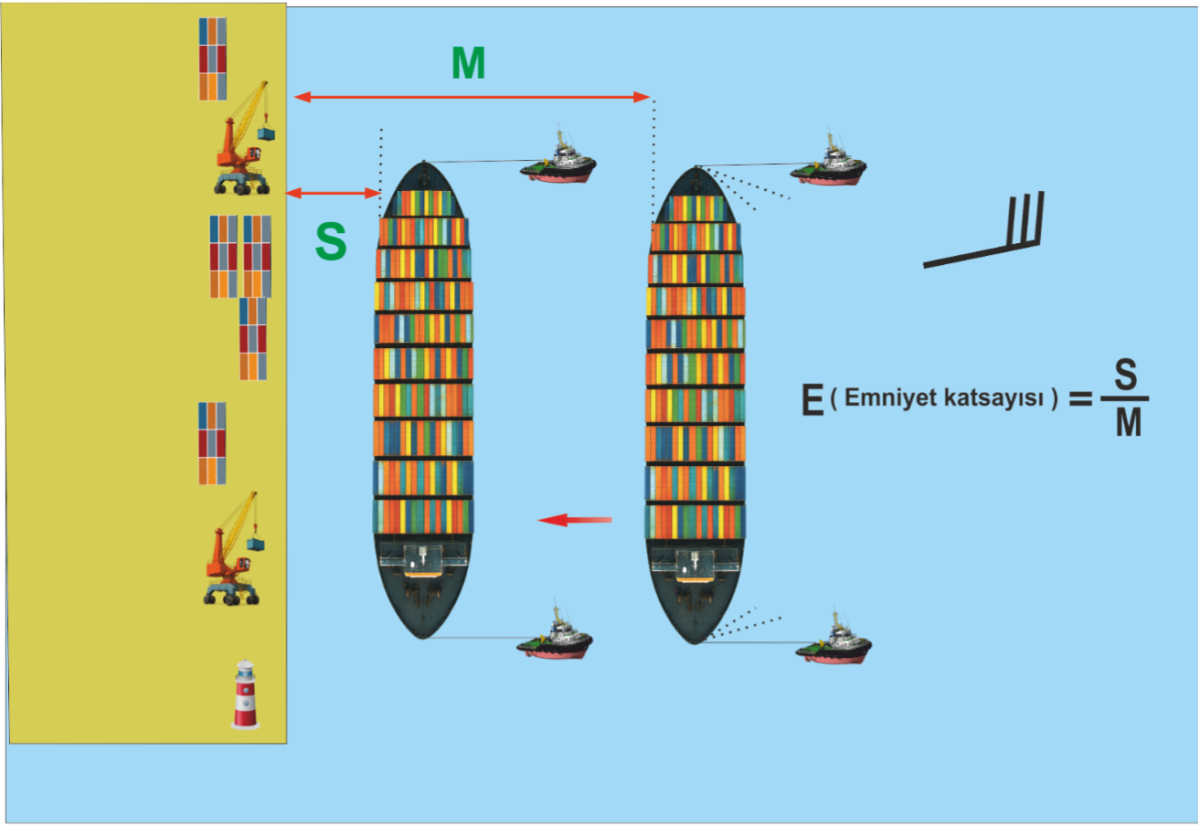
Yukarıdaki şekilde, sert bir sıkıcı rüzgâra karşı baş ve kıçtan bağladığı iki römorkörün yardımıyla yanaşma manevrasında olan bir gemi gösterilmektedir. (M) mesafesi, römorkörlerin rüzgâr etkisine karşı gemiyi çekmeye başladıkları noktadan rıhtıma olan mesafeyi gösterir. (S) mesafesi de geminin yatay hareketinin durduğu noktadan rıhtıma olan mesafeyi gösterir. S değerinin M değerine bölünmesi ile elde edilen emniyet katsayısının, geminin tonajına bağlı olarak 0,20 – 0,60arasında olması tavsiye edilir.
Geminin tonajı büyüdükçe emniyet katsayısının 0,20 değerine doğru yaklaşması beklenir. Geminin durdurma operasyonu ne kadar rıhtıma uzak bir mesafede başlar ise, katsayı da o kadar küçük olacaktır.
Bu alanda ilk araştırmalar, 1953 senesinde Birleşik Krallık limanlarındaki ve Arap Yarımadası’ndaki bazı yanaşmaları kaydeden Prof. A. L. L. Baker tarafından yapılmıştır. Bu araştırmalar, sonradan Saulin ve Brolsman adlı araştırmacılar tarafından geliştirilerek Brolsman Eğrileri adı verilen çizelgeler elde edilmiştir.
Brolsman, mevcut çalışmalara bazı İskoçya limanları ve Rotterdam’da elde edilen kayıtları da ilave etmiştir. Brolsman Eğrileri, sektöre teknik tavsiyeler vermek üzere toplanan bir kongrede detaylandırılarak PIANC 2002 (Daimi Uluslararası Navigasyon Kongreleri Teşkilatı – Permanent International Association of Navigation Congresses) kararları olarak sektörün hizmetine sunulmuştur.
Bu çalışmalara ilaveten, Alman yetkililerin gerçekleştirdiği EAU 2012 ve İspanyol yetkililerin yaptığı Spanish ROM 0.2 - 90 isimli çalışmalar da sektör tarafından kullanılmaktadır.
Bu çalışmalarda tavsiye edilen değerleri, gemilerin deadweight ton değerlerine bağlı olarak aşağıdaki grafik özetlemektedir:
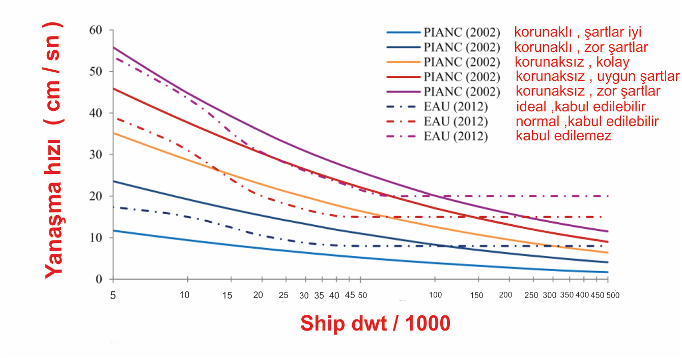
 Yukarıdaki grafikte noktalı eğrilerle gösterilen üç eğri EAU 2012 kriterlerine göre geminin dwt değerine bağlı olarak ideal ,normal ve kabul edilemez olan değerleri göstermektedir.
Yukarıdaki grafikte noktalı eğrilerle gösterilen üç eğri EAU 2012 kriterlerine göre geminin dwt değerine bağlı olarak ideal ,normal ve kabul edilemez olan değerleri göstermektedir.

Grafik incelendiğinde görülecektir ki 70.000 dwt sonrasında bu değerler birbirine oldukça yakın seyretmektedir.
Bu üç eğrinin sunduğu veriler kolaylık açısından ayrıca yukarıda tablo düzeninde de verilmiştir. Hız değeri cm / sn olarak verilmektedir.
Sonuç ve Öneriler :
- Boyuna ve enine yanaşma hızlarının yanaşma manevralarında standartlar dışında gerçekleşmesi ülkemizde ve dünyada yaşanan terminal kazalarının en önemli ve başta gelen nedenlerinden biridir.Bu tip kazaları mümkün olduğunca önlemek üzere gerekli standartların ilgili kılavuzluk bölgesinde yetkili liman başkanlıklarının liderliğinde uzman bir komisyonca belirlenmesi önem taşımaktadır. Ülkemiz ekonomisinin verimliliğini , tedarik zincirini ve ülkemizin uluslararası saygınlığını yakından ilgilendiren son derece önemli bir konudur.
- Kılavuz kaptan adaylarının sınavlarında ve gemi kaptanlığı ehliyeti için girilen sınavlarda bu konuya yer verilmesi isabetli olacaktır.
- Gemisinin karakteristik özelliklerini en iyi bilen meslek insanları olarak gemi kaptanları bu konuda üstlerine düşen bilgilendirme görevlerini eksiksiz ve ayrıntılı olarak yerine getirmeli , gerek gördükleri durumlarda kaygılarını ,tavsiyelerini gecikmeden ifade etmelidirler.
Saygılarımla ,
Kpt.Alpertunga Anıker



























Yorumlar 5
Kalan Karakter: